韩国首尔大学和嘉泉大学的研究团队成功开发出基于液体的下一代软体机器人,阐述了其特性、设计、实验表现、功能演示等方面,还提及了研究人员的后续计划。
在科技不断进步的今天,机器人领域也迎来了新的突破。3月25日消息传来,由韩国首尔大学机械工程系金浩荣教授、材料科学与工程系孙正允教授,以及嘉泉大学机械智能产业工程系朴建焕教授领导的研究团队,成功开发出了一种基于液体的下一代软体机器人。这一成果意义非凡,它突破了传统固体机器人仿生功能的局限,为机器人技术的发展开辟了新的道路。
这种独特的液态机器人具有细胞仿生特性,宛如生物细胞一般,它能够自由地变形、分裂融合,还能执行物质运输任务。这一特性标志着软体机器人技术取得了重大突破。相关研究成果已于3月21日发表在《科学进展》上。


为了让这款液态机器人兼具液体变形能力与固体结构稳定性,研究团队采用了创新性的“颗粒装甲”设计。他们将液态核心包裹在超高密度疏水颗粒中,就像给机器人穿上了一层坚固又灵活的“盔甲”。

实验结果令人惊叹。该机器人能够承受极端压缩或高空跌落冲击,并且能像液滴般自动恢复原状。同时,通过超声波控制技术,研究人员已经可以实现对其运动速度的精确调控,这为机器人的实际应用提供了更多的可能性。
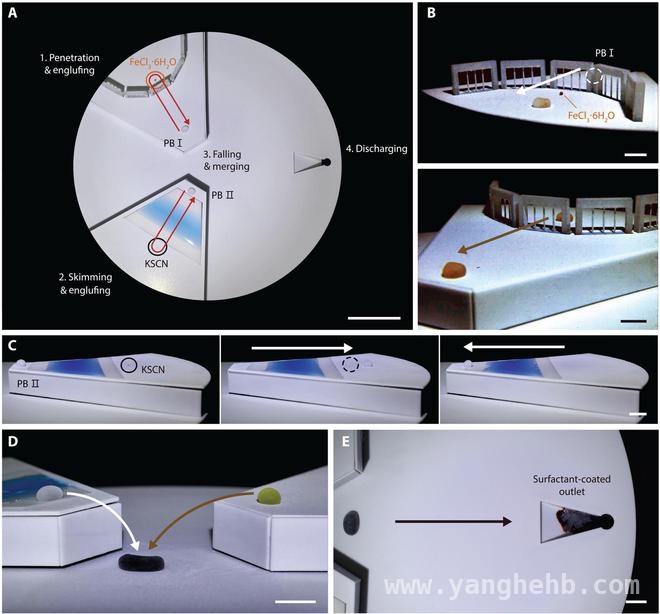
在功能演示环节,这款机器人的表现更是让人眼前一亮。它仿效1991年经典电影《终结者2》中的T – 1000,成功穿越金属栅栏间隙,还完成了异物捕获、运输以及多机器人融合等任务。此外,它还能在水面与陆地表面自由移动,展现出了强大的环境适应能力。

论文第一作者全孝彬透露,开发这款机器人并非一帆风顺。最初他们尝试采用传统液滴包裹颗粒法,但效果不佳。后来创新性地提出“颗粒包裹”工艺,才显著提升了机器人的稳定性。
通讯作者金浩荣教授表示,基于目前的研究成果,团队正在研究让液体机器人利用声波或电场变形的技术。共同通讯作者孙正允教授也补充道,他们计划增强液体机器人的材料功能,以便未来实现更广泛的工业应用。
本文介绍了韩国研究团队开发的基于液体的下一代软体机器人,它具有细胞仿生特性、独特设计和出色性能,在功能演示中表现优异。研究人员还透露了后续的研究和应用计划,这款液态机器人有望在未来实现更广泛的工业应用,推动机器人技术发展。
原创文章,作者:Delilah,如若转载,请注明出处:https://www.yanghehb.com/4584.html

